
Mekaaninen robottikyyhky on vastustamaton houkutuskuva joka takaa repuntäydeltä pataan pantavaa – tai sitten ei. Yrittänyttä ei kuitenkaan laiteta ja tekemisen hengessä rakensin itse kännykällä kauko-ohjattavan, mekaanisen houkutuskyyhkyn.
Olin pitkään miettinyt onnistuisiko mekaanisen houkutuskuvan tekeminen itse järkevässä ajassa ja sellaisella budjetilla, että homma kannattaa. Kimmokkeena projektin aloittamiselle oli kiinasta löytämäni halpa kaksiakselinen moottori, jossa tuntui olevan tarpeeksi vääntöä siipien voimanlähteeksi. Eräkäsityön pohjana toimi Motonetin full-body kyyhkykuva, joka irtosi kassalta parin euron kolikolla. Robokyyhkyyn liittyvä loppusälä löytyikin sitten rautakaupasta ja Ikeasta.
Robokyyhkyn rakentaminen on suoraviivaista ja kyyhky moottoreineen riittää jo perussuoritukseen, mutta halusin viedä projektin ns. nextille levelille rakentamalla siihen kännykällä toimivan kauko-ohjauksen. Näin moottorikyyhkyn voi käynnistää ja sammuttaa passin suojasta, mikäli se houkuttelun sijaan toimiikin kyyhkynkarkottimena. Kakkosvaiheen voi (ja ehkä kannattaakin) jättää tekemättä ja tyytyä ohjaamaan kyyhkyä suoraan patteripaketilla.
Osa 1: Robokyyhkyn rakennus
Tarvikelista arvioituine hintoineen on seuraava:
- Kyyhkyn full body houkutuskuva, n. 2 – 3 €
- Kaksiakselinen moottori kiinasta, n. 1 €
- 2m x 6mm kierretankoa (riittää ainakin neljään kyyhkyyn), 3 €
- Jatkomuttereita / -holkkeja, 1 €
- Ikean FINFÖRDELA -leikkuulauta 1,99 €
- Kuumaliimaa, johtoa, sekalaista rakennusjätettä
Ensiksi preparoidaan moottori. Se piti nostaa puupalan avulla muutaman sentin ylöspäin kyyhkyn vatsasta, johon koko komeus myöhemmin kiinnitettäisiin. Käytin moottorin kiinnittämiseen prototypoinnin hengessä kuumaliimaa, mikä ei liene kaikista pitkäikäisin ratkaisu ja jonka saanee korjata heti ensimmäisen syksyn jälkeen. Näin jälkikäteen suosittelisin tähän epoksia tms. ”oikeaa liimaa”. Tässä vaiheessa kiinnitetään myös moottoriin virtajohdot.
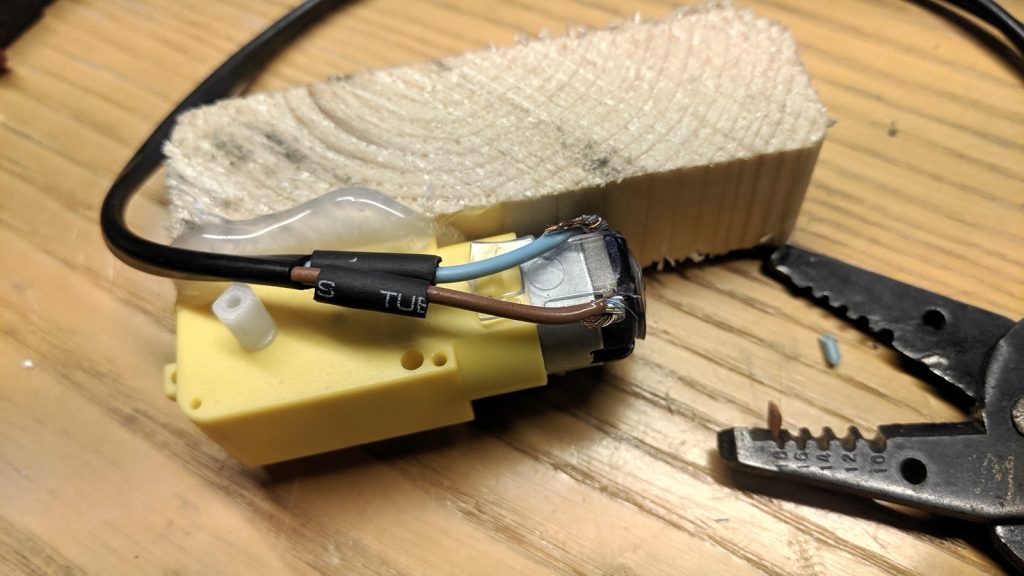
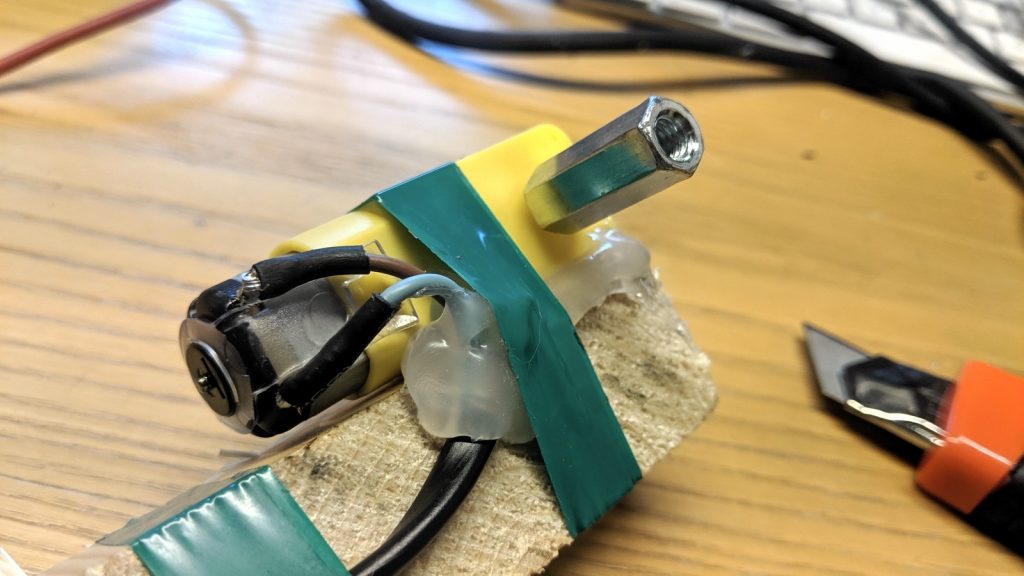
Ajatus on tehdä kyyhkystä mahdollisimman helposti kokoon purettava kuljetusta varten. Siksi valitsin siipien rungoksi kierretangot. Kierretankoon saa rautakaupasta jatkomuttereita, jotka sattumalta istuvat aika hyvin moottorin akseliin. Näin saadaan helposti koottava paketti. Kun jatkomutteri on kierretty kiinni moottoriin on paketti asennusvalmis.
Seuraavaksi otetaan kyyhkyaihio ja avataan sen vatsaa mattoveitsellä sen verran että moottoripaketti saadaan keploteltua sen sisään.

Tässä vaiheessa kannattaa arvioida mihin kohtaan kyyhkyn hartioita siipien akselin reiät porataan ja merkata ne. Moottori kiinnitetään kyyhkyn vatsaan ruuveilla. Tälläiseen hommaan sopivat hyvin ”purkinpohjat”, eli projektin jokainen ruuvi on eri mallinen.

Sitten on aika porata siiville reiät. Tässä ei ole niin väliä saadaanko aukko juuri kohdalleen, sillä kyyhkyt tuskin sitä huomaavat. Kannattaa kuitenkin aloittaa poraaminen pienellä terällä ja laajentaa vasta kun oikea paikka löytyy.

Kun kaikki aukot ovat paikallaan sahataan kierretangosta sopivan kokoinen pätkä ja kiinnitetään se moottorin jatkomutteriin. Tässä voi käyttää kierrelukitetta tai liimaa, sillä asennus on pysyväisluontoinen. Kierretangon pituuden tulisi olla sellainen, että ulkopuolelle jää tarpeeksi tankoa jatkomutteria varten.

Lopuksi sahataan kierretangosta varsinainen siipi ja muotoillaan Ikean harmaasta leikkuulaudasta siihen sopiva pala. Siipi viimeistellään töräyksellä valkoista maalia tai valkoisella teipinpalalla.

Kyyhkyn moottori vaatii kuorman kanssa toimiakseen muutaman patterin verran vääntöä. Itse käytän USB-akkupankkia voimanlähteenä, mutta kolme-neljä sormiparistoa toimii yhtälailla. Sopivia paristorasioita saa kiinakaupasta tilaamalla samalla kun ostaa moottorit.

Pohjan sulkeminen tapahtuu apupalikan avulla 
Molemmat kyyhkyt ilman siipiä
Osa 2: kauko-ohjauksen rakentaminen
Tämä menee vähän insinööritieteiden puolelle, mutta täydellisyyttähän tässä ollaan hakemassa eikö vain. Moottorikyyhkyn kauko-ohjaus rakennetaan Wemosin valmistaman ESP8266-piirin ja relekortin avulla. Piiri luo käynnistyessään avoimen WLAN-verkon jonka kantavuus riittännee haulikonkantaman verran. Kun verkkoon kytkeytyy, avautuu kännykkään verkkosivu, jonka avulla moottorit voi käynnistää ja sammuttaa.
Relesovelluksen kirjautuminen kännykällä 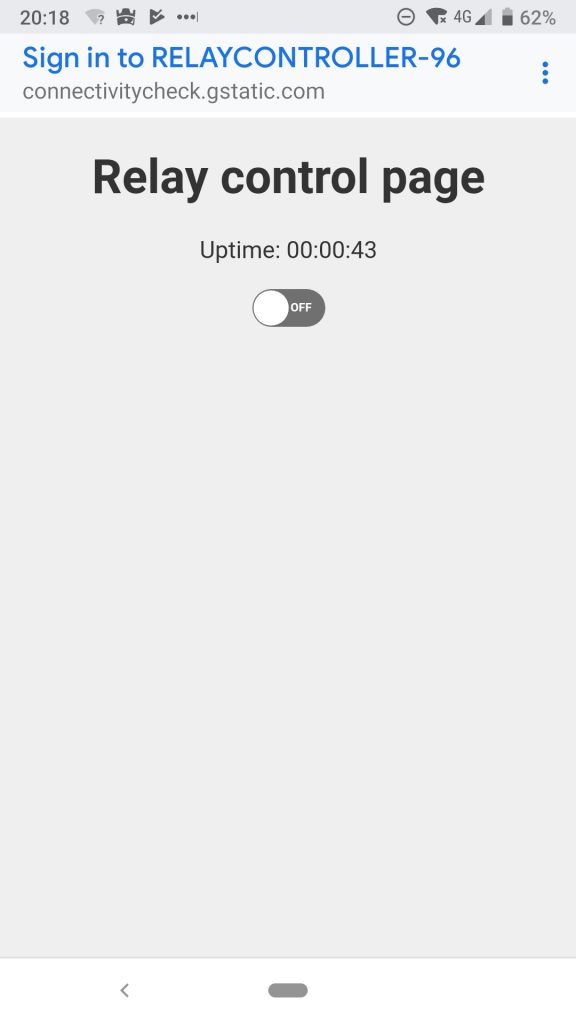
Rele sammutettuna 
Rele käynnissä
Poiketen edellisestä, tätä osuutta ei ole edes tarkoitettu kaikkien ymmärrettäväksi, mutta kuvien perusteella systeemin toiminnasta saa jonkin valtakunnan käsityksen.
Vaadittavat osat:
- Wemos D1 mini, 2 €
- Wemos Relay Shield, 0,83 €
- Kaapeleita yms.

Kokoonpano: laitetaan D1 mini ja Relekortti piikkirimojen avulla yhteen. Kytketään 5 V ulostulo ja maajohto releeseen, samoin kyyhkyn johdot. Lopuksi ajetaan softa sisään (se löytyy täältä) Arduinon IDE:llä ja testataan toimiiko homma.
Relehän toimisi vaikka 220 V jännitteen kanssa, mutta tässä kytkennässä moottorin energia otetaan piiriä voimaannuttavasta USB-akkupankista Wemosin 5 V nastan kautta. Yhdellä akkupankilla pystyy pyörittämään ainakin kahta kyyhkyä ilman että mystinen savu karkaa piiristä. Paperin perusteella moottori ottaa ilman kuormaa 6 V jännitteellä 200 mA ja akkupankin pitäisi pystyä tarjoamaan päälle 2 A virtaa, joten voisin kuvitella että tehoa riittäisi vielä suuremmallekin kyyhkymäärälle.
Jos pykäät itsellesi mallin mukaisen kyyhkyn, heitä kuvalla tai kommenttia niin katsotaan miten ohjetta voisi parantaa :)



Kiitos ohjeista, kauko-ohjattavien laitteiden asentaminen on kiehtova prosessi. Itseäni kiinnostaa lisäksi myös suurempiin rakennustöihin käytettävä robotiikka. Esimerkiksi vedenalaisissa tunnelitöissä käytettävien ROV-laitteiden toiminnasta löysin tällaisen sivuston:
https://www.loxus.com/fi/palvelut/loxus-rov–kalusto
Siipien materiaali onkin sitten eri juttu. Ajattelin ohutta kimmoisa pleksiä tai sitten piimä purkista leikkaamalla. Mitäs mieltä olette? Ehdotuksia otetaan vastaan.
Mulla nuo siivet oli yhtälön vaikein pala. Pleksi voisi toimia kunhan saat akselin järkevästi. Muovien kanssa kannattaa tsekata että esim liukkaissa rasvaisen tuntuisissa muoveissa ei maali tai liimat pysy.